AeroQuad build, part 3
- Building a quadcopter
- First steps with Arduino
- Quadcoper project rebooted
- AeroQuad build, part 1
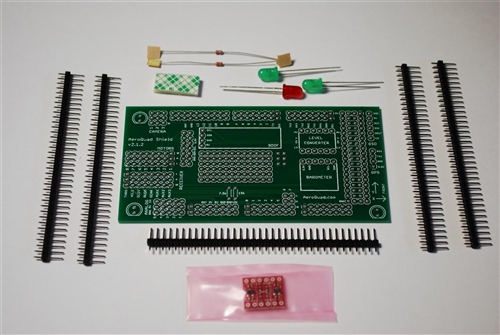
- AeroQuad build, part 2
This is 6th post in a series about building an AeroQuad open source quadcopter, and it’s long overdue, considering that my quad has been in a flying state for almost a month.
In my last post, I summed up the things I still needed to do to get there:
- Connect motors to ESCs
- Add Arduino power feed to power distribution hub
- Create extra level for mounting the flight controller on the frame
So, the 3 motor-side wires on each ESC were extended using 14AWG silicone wire. Those wires run through the carbon fibre arms of the Talon V2 frame:

The connectors on the motors and on the wires just click together, and they are isolated with shrink wrap. However, this cannot be done at this stage, because the spinning direction of the motors has yet to be determined. The motors are first wired randomly, and later, when a motor turns out to spin in the wrong direction, two of the wires have to be switched. This procedure is part of the calibration, which I am (most conveniently) not going to cover in this post.
For the extra level, I bought some more materials:
- Epoxy plate, 1,5mm thick. Cost: € 12.99
- Some M3 Nylon Threaded Spacers. Cost: US$ 3.68
- Some M3x12mm Nylon Screws. Cost US$ 2.04
- M3 Nylon Nuts. Cost: US$ 0.80. Last 3 items added US$ 1.43 for shipping.
I cut a disc out of the epoxy plate, large enough to fit the flight controller, and fitted some nylon spacers on to it. I also added 4 holes for mounting the plate onto the Talon frame. The frame comes with some nylon spacers, meant for mounting a flight controller directly on top of it, and I use those positions for attaching the plate.


It is important to note which is the front side of the quad (see the small pencil-drawn arrow on the mounting plate). The flight controller has to be mounted with one specific side pointing forward. I will be flying in Quad-X mode, meaning that the front of the quad is in the middle between two arms. The mounting holes in the plate are positioned exactly right for this configuration.
Here’s an idea of how it looks when everything is stacked together:

- Talon V2 frame with power distribution inside
- ESCs strapped on the top plate of the frame, with motor-side wires on the inside, and power supply and controller wires on the outside
- Epoxy plate mounted on the frame, with leads from the ESCs and the power supply wires for the Arduino coming through the hole in the center of the plate
- Arduino mounted on top of the plate
The AeroQuad shield is missing from this picture, as is one other important part: the 2.4 Ghz receiver!

I actually forgot about the receiver when I placed my last order with Hobbyking, and this meant I had no wires to hook the receiver up to the flight controller. Add to your shopping list:
- 10CM Male to Male Servo Lead (JR) 26AWG (10pcs/set). Cost: US$ 4.51 + US$ 1.43 shipping.
Now, putting it all together is not very difficult anymore. The things I’m going to skip for now are:
- Adding a battery. I use a strap to attach it to the bottom plate of the frame.
- Wiring the motors and the receiver to the AeroQuad shield
- Calibrating the quad and all of the sensors with the AeroQuad Configurator software
- Pairing transmitter and receiver and configuring AUX channels on the transmitter
- Adding propellors
Fast forward to the (more or less) finished product:


Its maiden flight was on 8 September 2013.
Total expenses: US$ 593.04 + € 25.89, but that excludes some things I forgot to count:
- 3.5mm polymax connectors
- Lots and lots of tie-wraps 🙂
I think I’ll dedicate a later post to the complete shopping list.