AeroQuad build, part 1
Posted on: Sunday 28 July 2013 /
A few weeks ago, I rebooted my quadcoper project and ordered a lot of parts from Hobbyking. In the mean time, the parts arrived, and I have been making my first steps in actually building something.
The first thing was assembling the Talon V2.0 carbon fiber frame and mounting the motors. That’s a very easy task, except when trying to fit some props on the motors after mounting them on the frame, I discovered that the Turnigy 2217 motors should be mounted up-side down, so the motor-mounts on the frame had to be flipped. Click the images to enlarge.
The next thing on the list was the power system, meaning everything to connect the motors to the ESCs and the ESCs to the battery. For this, I needed some extra hardware, that I got from different sources:
Total expenses for these parts: € 12.90.
First I extended the 3 motor-side wires of every ESC to make them long enough to span the booms of the frame. I just soldered the wires together and covered the joint in shrink tub02e.
Next, I prepared the power distribution hub, by soldering the wires and the HXT connector to it:
To complete the power system, I need 12 connectors to connect the motors to the ESCs. I probably should get some of these 3.5mm “PolyMax” connectors, but I’d rather get them at a local shop and I haven’t been able to find any just yet.
So that’s what has been done so far.
In the mean time, I ordered some more stuff from Hobbyking:
- the Turnigy 9X Transmitter & Receiver (Mode 2). Hey, it’s probably a piece of junk, but I have to start somewhere, and this one I can afford right now. Cost: US$ 53.82 and US$ 27.55 for shipping, makes US$ 81.37 in total.
- a bunch of EC3 connectors , that I am going to use to connect to ESCs to the power distribution hub. Cost: US$ 6.88 including shipping.
That brings the grand total of all expenses so far at US$ 573.19 + € 12.90.
And there is one more problem to solve. Since the Talon frame is pretty compact, it doesn’t offer enough space for all the components. The top plate will used to house the ESCs, like so:
An extra level on top of that is needed to house the Arduino with the AeroQuad shield and the R/C receiver. This level has to be a little bit bigger than the plates of the Talon frame, otherwise there will not be enough room for all the parts.
Fitting an extra level on top of the Talon frame is easy enough. I could use the nylon spacers that came with the frame, or I could easily make some custom spacers using threaded wire. An important question is what material to use: aluminium, wood, plastic? It should be strong, yet light. And affordable. I decided to go with 1.5mm thick epoxy plate. Unfortunately, due to a small error on Conrad’s website, I now have a piece of 0.5mm thick epoxy plate at home, which is too flexible to use. I’ll have to exchange that for the right stuff.
So, the current situation is:
- Frame needs an extra level. Correct epoxy plate not yet ordered. Also need a dome or some other protection for the electronics during flight.
- Power system: need to buy connectors for motor-to-ESC connections and waiting for EC3 connectors to connect ESCs to power distribution hub. Otherwise finished.
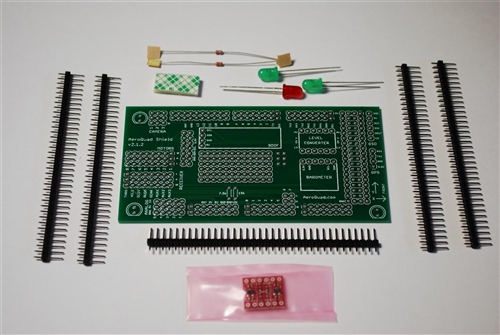
- Flight electronics: AeroQuad shield soldering halfway finished. Pictures of that in the next post. Software not yet loaded onto the Arduino, but installed on my computer.
- 2.4 GHz transmitter/receiver pair is on its way.
Next: AeroQuad Build, part 2.